

搜索
目前,大多数商用胶囊内镜的主要问题是缺乏对运动的控制。将来,是否能通过界面应用,让临床医生将能够停止并将设备引导到感兴趣的点,以便进行详细的检查/诊断和治疗递送?笔者搜集国内外资料整理出了六款创新的胶囊内镜,以窥未来发展趋势。
无电池胶囊内镜
1993年RF公司在日本长野成立。这款名为Norika3的深海潜艇式太空舱是在1997年RF公司加入日本实验舱项目时开发的。后者是由日本国家空间发展局运营的一个企业,用于监测载人航天器中植物的生长。RF公司开发了拼接技术,用于实验模型Norika 3 。拼接表示在计算机显示器上的最终图像是通过组合从不同的角度拍摄多个图像进行处理的。
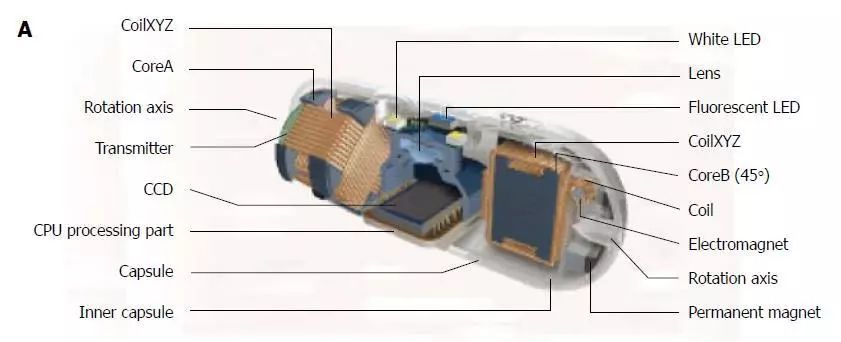
Sayaka是首款“无电池胶囊内镜”,是在Norika 3的基础上发展起来的,于2001年12月问世。
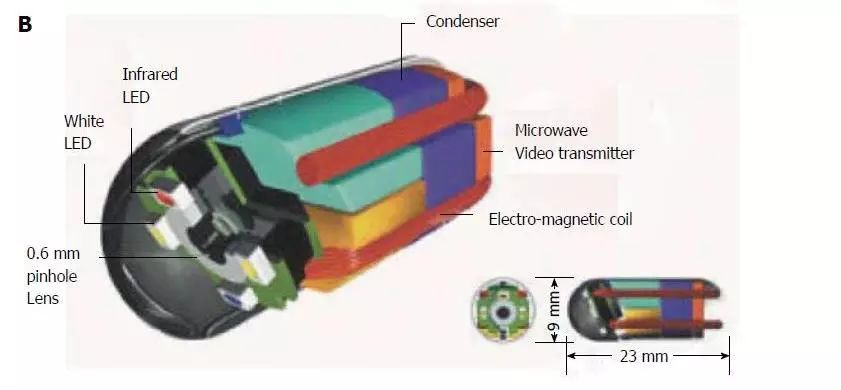
胶囊内镜的尺寸为9 mm×23 mm,0.6毫米彩色镜头和410000像素电荷耦合设备相机可以获得高达每秒30帧(fps),只需患者穿着将微波传输到胶囊的背心。两个罐与阀定位在中心和一个有用于存储电力以及微波视频信号发射机。在相机镜头周围,放置了四个白色LED和用于调焦的磁线圈。更重要的是,40%的体积是自由空间,可用于手术目的,如药物喷雾,激光治疗,pH传感等。虽然这种胶囊已经在网上描述了十多年,至今仍没有对这种胶囊进行人体实验。
自我稳定胶囊内镜
使用自稳定胶囊内镜(SsCE)成像胃肠道的创新方法于2006年首次提出。
SSCE允许使用单极成像器的设计用于可视化消化道的较宽直径段如结肠无翻滚并用被动扩张结肠壁的能力。胶囊外壳被设计成在结肠,它公开附连到的胶囊型内窥镜的背部的半渗透的,可膨胀的容器以溶解,而在相机上同时接通。
在最近对活犬模型进行的实验研究中,对4只杂种狗进行了剖腹手术,并植入了5-8个缝线标记以接近结肠病变。每只狗都有随机顺序的单顶CE和ScCE。未修改的胶囊内镜,自稳定胶囊内镜和结肠镜检查的标记物检出率的平均百分比分别为31.1%,86%和100%(P <0.01),同时具有自我稳定的胶囊内窥镜检查和结肠镜检查明显优于未修改的胶囊内镜。
ODOCAPSULE
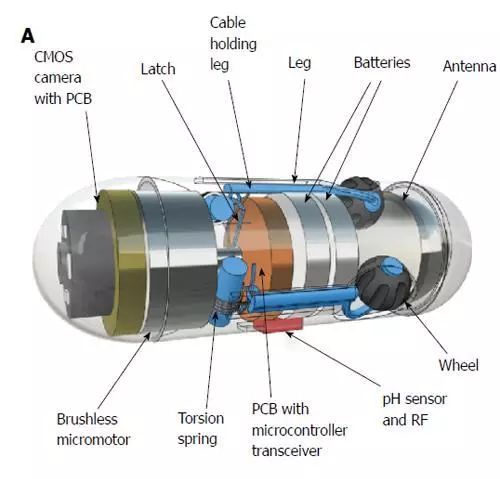
它配有3个微型腿,每个腿都带有一个轮子。这些腿伸出和缩回得益于微电机和三个定做扭力弹簧。通过记录它们执行的每个旋转,车轮专门设计用作微型里程表。当Odocapsule穿过小肠时,轮子转动并且它们的旋转被转换到装置覆盖的距离,从十二指肠进入点到每个感兴趣的区域/点。

由于腿可以三脚架形式展开,它们允许装置在不妨碍其运动的情况下稳定自身,从而提供平滑的视频捕获而不会遗漏任何病变。
药物输送胶囊内镜
Enterion由辉腾研究,英国诺丁汉开发。它可用于宽范围的不同的药物制剂中的靶向递送进入肠道。它是一个32毫米长的胶囊装置,包含一个容量约为1毫升的药物容器。
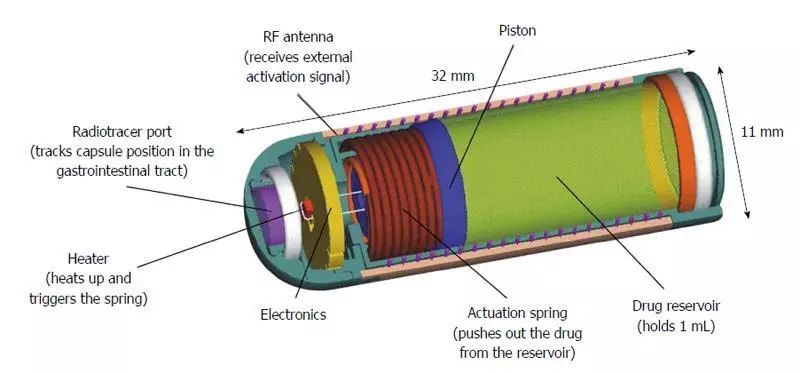
当弹簧释放时,Enterion能够通过9毫米开口输送任何类型的药物配方(包括干粉,半固体,悬浮液或溶液配方),迫使活塞沿着胶囊的轴移动,从而,清空所述容器到胃肠道的特定位置。将放射性标记物放置在单独的密封示踪剂端口内,以允许使用γ闪烁扫描法实时观察胶囊位置。活塞的运动还操作开关,该开关以精确的频率传输弱无线电信号。这个信号的检测从外部确认胶囊已成功。活塞运动在胶囊末端附近停止,这保持了密封并防止内部电子元件与GI流体接触。
球形胶囊内窥镜
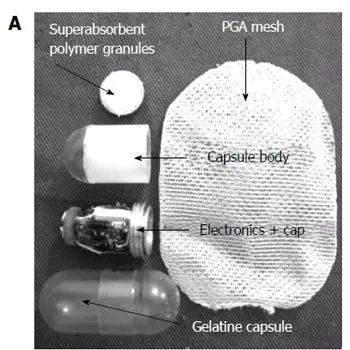
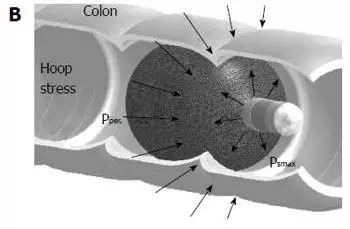
Supcam由欧盟FP7在2012 - 2014年期间开发.球形内窥镜胶囊,可以在无限模式下安全,准确地从外部通过电磁铁沿结肠腔引导,用于评估结肠,。该胶囊不用于摄取,而是作为栓剂给药。内窥镜装置有具有小的(直径约2cm)球形囊(实际上有2层,内球和外球)的外观,具有紧凑的外部控制系统,可由医疗操作者按顺序容易地控制支持他诊断结肠直肠疾病。
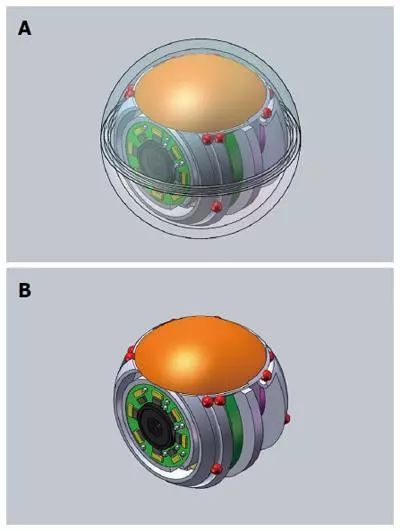
外部设备将是紧凑的并且适于被运输并且适合于大多数常见门诊,类似于超声扫描仪。到目前为止,这个新系统已经在国际科学会议上展示,并且有关于磁控系统与实验室模拟以及模型结肠模型 的有效性的数据。但还没有动物实验的数据。
动力追踪胶囊内镜
动力跟踪系统(MTS)是可吞咽的小磁丸(6 mm×18 mm,密度1.8 g / cm 3),涂有塑料。当患者摄入时,小型电子药丸在其整个通过胃肠道的过程中发出信号。它的运动由16个磁场传感器(4×4)的探测器板跟踪,频率为10 Hz。从与一个迭代算法,每个传感器数据被用于计算磁丸的位置和方向。

第一代MTS-1已被引入用于描述成人的胃肠动力。当前版本的Motility Tracking System-2(MTS2)也称为3D-Transit并且能够同时跟踪多个药丸,记录该信号并随后下载到数据管理站。
本文由器械之家翻译整理自外网,转载请注明出处。

苏ICP备2021034345号 版权所有:苏州蓝点医疗科技有限公司 互联网药品信息服务资格证编号:(苏)-非经营性-2021-0189










请登录后参与评论...
登录后参与讨论
提交评论